Controllo PID
Nozioni di base del controllo PID
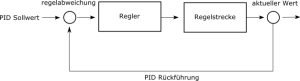
Un controllore PID è una struttura di controllo che cerca di regolare una specifica variabile controllata (pressione, temperatura, ecc.) su un setpoint specificato (setpoint PID). A tal fine, il controllore ha bisogno di informazioni sullo stato attuale del sistema sotto forma di un valore misurato (sensore di pressione, sensore di temperatura, ecc.). Questo segnale è chiamato retroazione PID.
Questa struttura di controllo ha solitamente tre componenti: P = Proporzionale, I = Integrale e D = Differenziale.
.
Come è regolamentato qui?
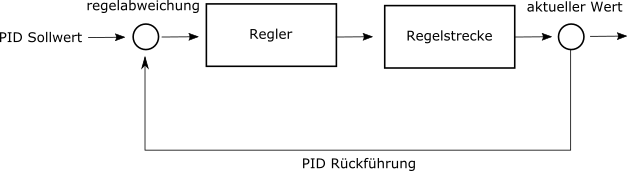
Nell’immagine si può notare che il valore di retroazione PID viene sottratto dal setpoint PID. Da qui viene generato il segnale differenziale. Se i due valori sono uguali, non è necessaria alcuna correzione e il convertitore di frequenza non modificherà la propria frequenza. Se il setpoint PID è maggiore del valore di retroazione, il segnale di differenza è positivo e il convertitore di frequenza aumenta la frequenza di uscita finché il setpoint PID e il valore di retroazione PID non sono uguali. In questo modo, la frequenza viene regolata in modo continuo finché c’è una differenza tra il setpoint PID e la retroazione PID.
Esempio semplicel:
Setpoint PID uguale alla retroazione PID ==> nessuna variazione di frequenza sull’inverter
Il setpoint PID è maggiore della retroazione PID ==> aumento della frequenza sull’inverter
Il setpoint PID è inferiore alla retroazione PID ==> diminuzione della frequenza sull’inverter
Effetto delle singole parti della regolazione PID
P – Condividi:
Der P-Anteil ist der proportionale Anteil, das bedeutet, dass die Wirkung nur von der momentanen Differenz zwischen PID Sollwert und PID Rückführung abhängig ist. Allerdings ist der Nachteil, dass je stärker sich Sollwert und Rückführung annähern die Korrektur auch immer geringer wird. Dadurch wird das Regelverhalten verlangsamt. In der Theorie wird der Sollwert nie erreicht.
I – Condividi:
Il componente I può risolvere il problema del mancato raggiungimento del setpoint da parte del componente P. Il componente I integra la differenza tra il setpoint e la retroazione. Anche con piccole differenze, dopo qualche tempo il segnale di correzione diventa abbastanza grande da correggere l’errore tra il setpoint PID e la retroazione PID.
D – Condividi:
Il componente D risolve un altro problema del regolatore P. Poiché il segnale di correzione non può mai essere maggiore della differenza tra il setpoint PID e la retroazione PID, la componente D può amplificare brevemente questa differenza e quindi accelerare la risposta del regolatore. Tuttavia, questa soluzione è consigliata solo se non si riesce a ottenere un buon comportamento di controllo con i componenti P e I.
« Back