PID-Regelung
Grundlagen der PID-Regelung
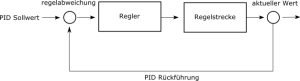
Ein PID-Regler ist eine Regelungsstruktur, die versucht eine bestimmte Regelgröße (Druck, Temperatur, etc.) auf einen vorgegebenen Sollwert auszuregeln (PID Sollwert). Um dies zu tun benötigt der Regler Informationen über den aktuellen Status des Systems in Form eines Messwertes (Drucksensor, Temperatursensor, etc.). Dieses Signal wird PID Rückführung genannt.
Diese Regelungsstruktur hat im Regelfall drei Anteile: P = Proportional, I = Integral und D = Differential.
Wie wird hier geregelt?
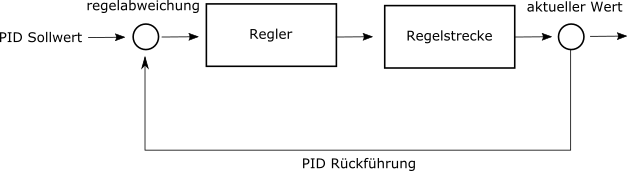
Auf dem Bild können Sie erkennen, dass von dem PID Sollwert der PID Rückführungswert abgezogen wird. Daraus wird das Differenzsignal erzeugt. Sind die beiden Werte gleich, ist keine Korrektur nötig und der Frequenzumrichter wird seine Frequenz nicht ändern. Ist der PID Sollwert größer als der Rückführungswert, ist das Differenzsignal positiv und der Frequenzumrichter wird seine Ausgangsfrequenz solange erhöhen bis der PID Sollwert und der PID Rückführungswert gleich sind. Also wird kontinuierlich eine Anpassung der Frequenz vorgenommen, solange eine Differenz zwischen PID Sollwert und PID Rückführung besteht.
Einfaches Beispiel:
PID Sollwert gleich PID Rückführung ==> keine Änderung der Frequenz am Umrichter
PID Sollwert größer als PID Rückführung ==> Erhöhung der Frequenz am Umrichter
PID Sollwert kleiner als PID Rückführung ==> Absenkung der Frequenz am Umrichter
Wirkung der einzelnen Anteile der PID-Regelung
P – Anteil:
Der P-Anteil ist der proportionale Anteil, das bedeutet, dass die Wirkung nur von der momentanen Differenz zwischen PID Sollwert und PID Rückführung abhängig ist. Allerdings ist der Nachteil, dass je stärker sich Sollwert und Rückführung annähern die Korrektur auch immer geringer wird. Dadurch wird das Regelverhalten verlangsamt. In der Theorie wird der Sollwert nie erreicht.
I – Anteil:
Der I-Anteil kann das Problem des Nichterreichens des Sollwertes vom P-Anteil lösen. Der I-Anteil integriert die Differenz zwischen Sollwert und Rückführung. Auch bei kleinen Differenzen wird nach einiger Zeit das Korrektursignal groß genug um den Fehler zwischen PID Sollwert und PID Rückführung zu korrigieren.
D – Anteil:
Der D-Anteil löst ein weiteres Problem des P-Reglers. Da das Korrektursignal nie größer sein kann als die Differenz des PID Sollwertes zur PID Rückführung, kann der D-Anteil diese Differenz kurzzeitig verstärken und damit die Reaktion des Reglers beschleunigen. Dies wird aber nur empfohlen, wenn mit dem P und dem I Anteil kein gutes Regelverhalten erzielt wird.
« Zurück